Równania algebraiczne różniczkowe (DAE – Differential-Algebraic Equations) to równania zawierające nieznaną funkcję i jej pochodne. Układ równań algebraicznych-różniczkowych w swojej ogólnej formie opisany jest następująco:

gdzie x = x(t) to nieznana funkcja i F=F(t, u, v) zawiera N składowych: Fi, i = 1,2,…,N.
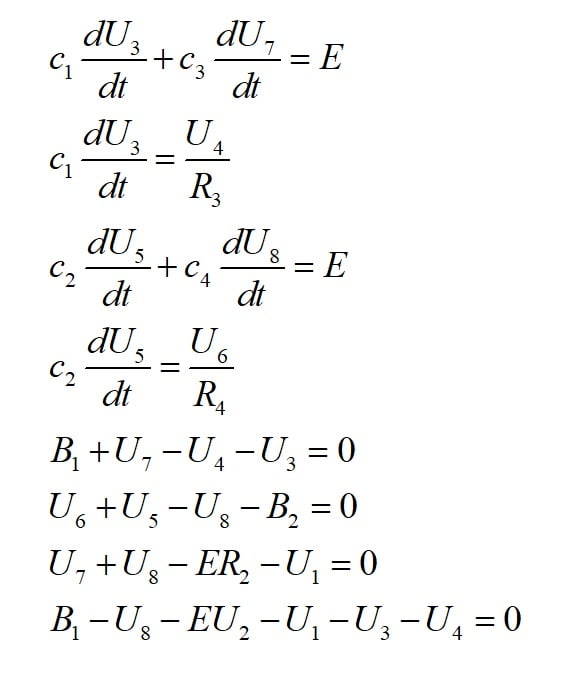
Rozważmy przykładowy problem:
Istnieje kilka bibliotek, których można użyć do rozwiązania takich zagadnień, ale ich użycie może być skomplikowane. Tym razem zobaczymy jak rozwiązać taki problem za pomocą fsolve z biblioteki SciPy.
Metoda polega na dyskretyzacji pochodnych czasowych – zamiast dUi/dt użyjemy ΔUi/Δti:

Wartość ΔUi jest równa różnicy między dwoma kolejnymi wartościami czasu. Zatem otrzymujemy:

W ten sposób układ równań różniczkowo-algebraicznych został przekształcony w układ równań algebraicznych. Teraz musimy przenieść niezerowe elementy na lewą stronę równania w następujący sposób:

Ostatecznie w każdym kroku czasowym musimy rozwiązać układ równań algebraicznych f0, f1,…f7.
Rozwiązyanie układu równań algebraicznych-różniczkowych w Pythonie
Najpierw zaimportujemy niezbędne biblioteki:
import numpy as np
from scipy.optimize import fsolve
import matplotlib.pyplot as pltZdefiniujemy funkcję opisującą równania algebraiczne:
def dae_eqs(U, *args):
# U denotes vector of variables at time t + time_step. U(0) means U1, U(1) is U2 and so on.
# *args contains Ut and time_step
# Ut denotes vector of variables at time t.
# value of time step is necessary for calculating discretized derivatives.
# Unpack arguments
Ut, time_step = args
# set some arbitray values of parameters
c1 = 1.0
c2 = 2.0
c3 = 3.0
c4 = 4.0
R2 = 2.0
R3 = 3.0
R4 = 4.0
B1 = 1.0
B2 = 2.0
E = 5.0
# Let's assign values of U array to U1, U2, ... for ease.
U1 = U[0]
U2 = U[1]
U3 = U[2]
U4 = U[3]
U5 = U[4]
U6 = U[5]
U7 = U[6]
U8 = U[7]
# The same for array Ut.
Ut1 = Ut[0]
Ut2 = Ut[1]
Ut3 = Ut[2]
Ut4 = Ut[3]
Ut5 = Ut[4]
Ut6 = Ut[5]
Ut7 = Ut[6]
Ut8 = Ut[7]
# Derivatives of U valuses. Some of them are not used, but let's leave them for consistency.
U1_deriv = (U1-Ut1)/time_step
U2_deriv = (U2-Ut2)/time_step
U3_deriv = (U3-Ut3)/time_step
U4_deriv = (U4-Ut4)/time_step
U5_deriv = (U5-Ut5)/time_step
U6_deriv = (U6-Ut6)/time_step
U7_deriv = (U7-Ut7)/time_step
U8_deriv = (U8-Ut8)/time_step
# calculate values of algebraic equations
f0 = c1 * U3_deriv + c3 * U7_deriv - E
f1 = c1 * U3_deriv - U4/R3
f2 = c2 * U5_deriv + c4 * U8_deriv - E
f3 = c2 * U5_deriv - U6/R4
f4 = B1 + U7 - U4 - U3
f5 = U6 + U5 - U8 - B2
f6 = U7 + U8 - E*R2 - U1
f7 = B1 - U8 - E*U2 - U1 - U3 - U4
# Gather all fs into one array
f = np.array([f0, f1, f2, f3, f4, f5, f6, f7])
return fZgodnie z wyjaśnieniem w pierwszej części artykułu, program główny wygląda następująco:
# set initial conditions for t = 0
number_of_unknowns = 8
U = np.zeros(number_of_unknowns)
# If initial conditions are different from zero, they should be set separately, as below
U[0] = 1.0
U[1] = 1.0
U[2] = 1.0
U[3] = 1.0
U[4] = 1.0
U[5] = 1.0
U[6] = 1.0
U[7] = 1.0
# set time step, end_time and time
time_step = 0.1
end_time = 5
time = 0
# Initial condition must satisfy the system. Therefore it is required to find proper solution at time 0.
u_0 = fsolve(dae_eqs, U, args=(U,time_step))
# Create arrays for storing solution
time_solution = np.linspace(0, end_time, (int)(end_time/time_step)+1)
u_solution = np.zeros((time_solution.size, number_of_unknowns))
i = 0
u_solution[0] = u_0 # assign initial condition
while time < end_time - time_step:
args = (U, time_step) # arguments for fsolve
u_next = fsolve(dae_eqs, U, args=args) # calculate u at time t + time_step
U = u_next # in next iteration U is equal U from previous iteration
u_solution[i+1] = u_next
time += time_step # increase time
i += 1
Teraz możemy narysować wykres przedstawiający wyniki.
fig, ax = plt.subplots(2)
ax[0].plot(time_solution, u_solution[:,0])
ax[0].set(ylabel='U1')
ax[0].grid()
ax[1].plot(time_solution, u_solution[:,1])
ax[1].set(xlabel='time (s)', ylabel='U2')
ax[1].grid()
#Plot the solution of differential-algebraic equations
plt.show()
Podsumowanie
Powyżej widzieliśmy, jak rozwiązywać równania algebraiczne różniczkowe w Pythonie. Takie problemy pojawiają się w wielu dziedzinach inżynierii, w tym biochemii, elektrotechnice i inżynierii procesowej.
Powyższa metoda nie jest doskonała. Wykorzystuje najprostszą dyskretyzację i nie zawsze będzie działać, na przykład, jeśli mamy do czynienia ze sztywnymi równaniami różniczkowymi. Istnieje kilka bibliotek Pythona, których można użyć. Niektóre z nich są wymienione poniżej:
https://pypi.org/project/diffeqpy/
https://lcvmwww.epfl.ch/software/daepy/
Więcej na temat DAE możesz dowiedzieć się na stronie Scholarpedia.
Jeśli chcesz dowiedzieć się więcej o rozwiązywaniu problemów inżynierskich za pomocą Pythona, zapoznaj się z ofertą kursu: Wprowadzenie do obliczeń naukowych przy użyciu języka Python
Skontaktuj się z nami
Skontaktuj się z nami, aby uzyskać profesjonalną pomoc w rozwiązywaniu problemów związanych z symulacjami i modelowaniem matematycznym.