This is a part of the lecture notes in process control.
Introduction
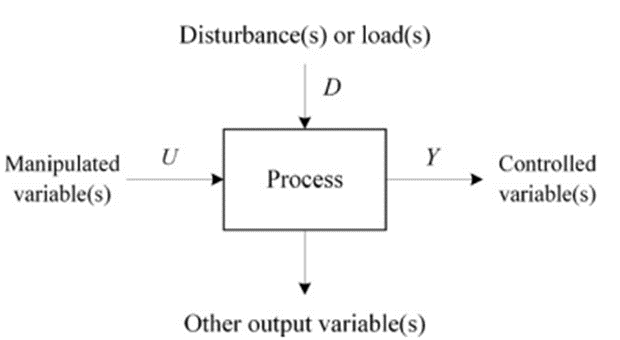
A mathematical relationship between the input and output variables in which time is independent is referred to as the dynamic model of the process. A dynamic model can be developed based on the first principles, i.e., mass, energy, momentum, etc., balances or based on an empirical approach using the input–output data of the process.
Example of a mathematical model: a pendulum
Description of the system
Let us consider an idealized pendulum (called a simple pendulum). This is a weight on the end of a massless cord suspended from a pivot point P. In this model, there is no frictional energy loss. The pendulum will swing back and forth with periodic motion.
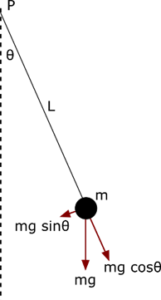
By applying Newton’s second law, the dynamical equation of motion for the pendulum may be obtained:
(1) ![\[\frac{{{d}^{2}}\theta }{d{{t}^{2}}}+\frac{g}{L}\theta =0 \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-8f96d2f767023422df64edd4e5d51c76_l3.png "Rendered by QuickLaTeX.com")
with initial conditions:
(2a) ![\[\theta (0)={{\theta }_{0}} \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-fc62e7b5475396891df671eb804dc051_l3.png "Rendered by QuickLaTeX.com")
(2a) ![\[\frac{d\theta (0)}{dt}=0 \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-e1e800d7146d4af91337527c014aea99_l3.png "Rendered by QuickLaTeX.com")
Where θ is the angle (angular displacement), L is the length of the cord, and g is acceleration due to gravity. At the initial moment, the angular displacement is equal to θ0, and the velocity is equal to zero. The above mathematical model can be used to determine the pendulum behavior, in this case the angular displacement with time. To this end, the differential Eq. (1) should be solved.
The solution of a pendulum model
There are several methods that can be used, for example, the method based on the Laplace transform (this one will be described in one of the next lectures). Here, we will utilize Matlab computing software. Detailed information on the procedure used can be found in the documentation:
https://in.mathworks.com/help/symbolic/dsolve.html
The Matlab script solve_pendulum.m, which solves the differential equation is attached to this lecture.
syms L g t theta(t) theta0
dtheta=diff(theta,t);
ts = dsolve(diff(theta,t,2)+theta*g/L==0,theta(0)==theta0,dtheta(0)==0);
ts = simplify(ts)The solution obtained is the following:
(3) ![\[\theta (t)={{\theta }_{0}}\cos \left( \sqrt{\frac{g}{L}}\cdot t \right)\]](https://softinery.com/wp-content/ql-cache/quicklatex.com-8ed91dc62e28abccc1d3777190608382_l3.png "Rendered by QuickLaTeX.com")
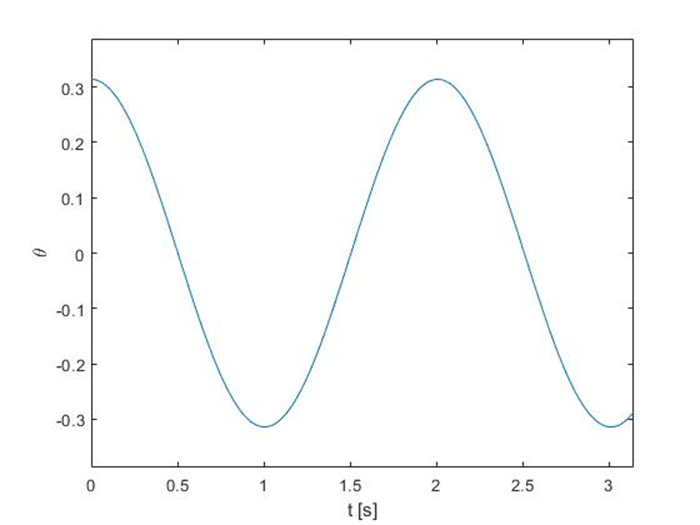
Now, using the solution, we can see how the angular displacement will change over time. To get real numbers, we have to set the values of the model parameters (i.e. the values that are constant: g and L in this case) and the initial condition θ0. The length will equal 1 m, while θ0 = π/10. Different values can be used, depending on the characteristics of the pendulum. The obtained relationship θ(t) is illustrated in Fig. 3. As could be expected, the displacement is changing periodically. We should notice that according to this mathematical model, the pendulum will swing infinitely long, as friction was neglected. In order to obtain more realistic results, a more detailed model has to be used.
At this point, it is necessary to introduce the definition of a state variable. A state variable is one of the variables that are used to describe the mathematical state of a dynamical system. In this example, θ is a state variable. It is possible that a dynamical system is described by more than one state variable.
The Matlab file Pendulum.m, which plots this diagram is also attached to this lecture.
syms t
g=sym(9.81);
l=sym(1);
theta0=sym(pi/10);
theta = theta0*cos(sqrt(g/l)*t);
gama=-theta0*sin(sqrt(g/l)*t)*sqrt(g/l);
figure(1)
ezplot(theta,[0,pi])
xlabel('t [s]')
ylabel('\theta')
title('')
figure(2)
ezplot(gama,theta)
xlabel('\gamma')
ylabel('\theta')
title('')
figure(3)
subplot(2,1,1)
ezplot(theta,[0,pi])
xlabel('t [s]')
ylabel('\theta')
title('')
subplot(2,1,2)
ezplot(gama,[0,pi])
xlabel('t [s]')
ylabel('\gamma')
title('')If you cannot use Matlab software, it is possible to go to the Wolfram Alpha website to see an online solver of this problem:
https://www.wolframalpha.com/input/?i=pendulum&lk=3
Transformation of a second-order ODE to a system of first-order ODEs
The presented model can also be used to get additional information about the velocity of the pendulum. However, some transformations are required. Eq. (1) is a second-order differential equation. It can be transformed into a system of two differential equations of first order. To this end, we need to introduce the additional variable γ:
(4) ![\[\gamma =\frac{d\theta }{dt} \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-d38e8af0a8aa977c17c3a5259732360f_l3.png "Rendered by QuickLaTeX.com")
As you can see, γ is the angular velocity, i.e. the change of angular displacement over time. If we derivate the above equation., then we get:
(5) ![\[\frac{d\gamma }{dt}=\frac{{{d}^{2}}\theta }{{{d}^{2}}t} \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-4ab2d636cf7ab4982543e370511a5609_l3.png "Rendered by QuickLaTeX.com")
Now, we will introduce a new variable and its derivative to Eq. (1). The system obtained as follows:
(6) ![\[\frac{d\gamma }{dt}+\frac{g}{L}\theta =0 \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-8c5409c85a98bbcd1980ced0b9271b4d_l3.png "Rendered by QuickLaTeX.com")
We obtained a system of two differential equations. Let’s rewrite it below:
(7a) ![\[\frac{d\theta }{dt}=\gamma \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-b84868b605a6e1b7671a32a80d342418_l3.png "Rendered by QuickLaTeX.com")
(7b) ![\[\frac{d\gamma }{dt}+\frac{g}{L}\theta =0 \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-3ee9fb555660d49d3fa159e4e33ccfac_l3.png "Rendered by QuickLaTeX.com")
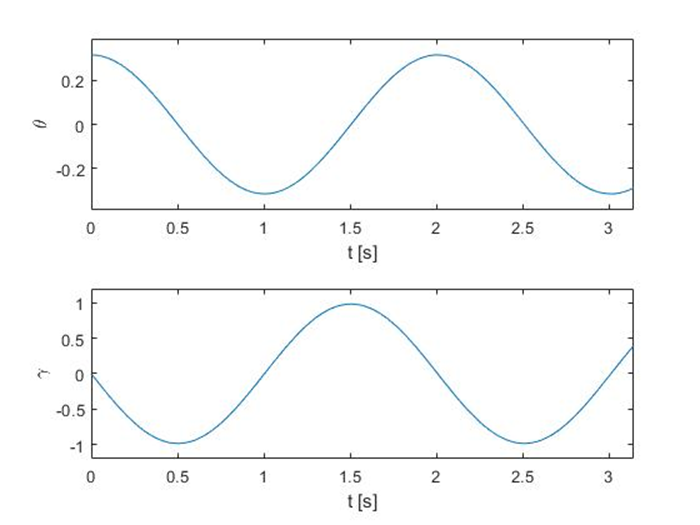
We can notice that the system is now described by two state variables: γ and θ. As before, the model should be solved. At this point, we will omit the method of solving the system of differential equations. The solution is following:
(8a) ![\[\theta (t)={{\theta }_{0}}\cos \left( \sqrt{\frac{g}{L}}\cdot t \right) \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-3ec63455c97bd968f61c42bef97a8c50_l3.png "Rendered by QuickLaTeX.com")
(8b) ![\[\gamma (t)=-{{\theta }_{0}}\sin \left( \sqrt{\frac{g}{L}}\cdot t \right)\sqrt{\frac{g}{L}} \]](https://softinery.com/wp-content/ql-cache/quicklatex.com-86d03d108775d45713b0771666e7818a_l3.png "Rendered by QuickLaTeX.com")
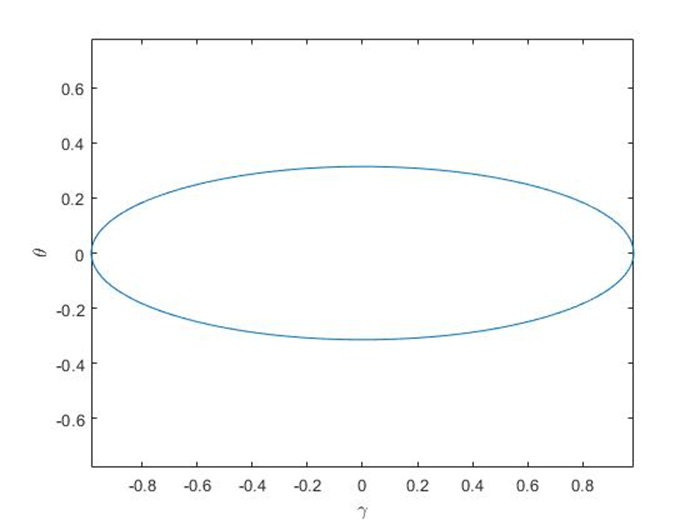
The solution is illustrated in Fig. 4. It is sometimes more convenient to show the results in a different manner. Figure 5 presents a phase trajectory. In simple words, it is a curve representing relationship between one state variable and another. The diagram at which coordinates corresponds to state variables is a phase plane. The trajectory shows how the state of a dynamical system changes with time. A periodic solution, such us obtained in this example, gives a closed loop called a limit cycle.
REFERENCES
Rohani, S. (2017). Coulson and Richardson’s Chemical Engineering: Volume 3B: Process Control. Butterworth-Heinemann.